
La Luna
Misiones
« Apartado anterior
Misiones de otros países
Misiones europeas

La Agencia Espacial Europea (ESA, por su nombre en inglés) inició el programa SMART (Small Missions for Advanced Research in Technology —«Pequeñas Misiones de Investigación Avanzada en Tecnología»—), cuya primera sonda, SMART-1, se lanzó el 27 de septiembre de 2003.
Una de sus misiones fue obtener una imagen tridimensional de la Luna a partir de imágenes con rayos X y cámaras infrarrojas, aunque el principal objetivo de la misión fue probar en vuelo la propulsión primaria eléctrica solar como tecnología clave para futuras misiones interplanetarias. Su final fue una colisión controlada sobre la superficie lunar en septiembre de 2006, obteniéndose información de los materiales evidenciados por el impacto.
La Manfred Memorial Moon Mission o 4M fue la primera sonda lunar privada que orbitó la Luna con éxito. Su nombre se eligió en honor al difunto fundador de OHB-System, Manfred FuchsFue. Fue construida por la empresa luxemburguesa LuxSpace y se lanzó con la nave espacial de prueba china Chang'e-5-T1 el 23 de octubre de 2014. Cuatro semanas después emitió su última transmisión, manteniéndose en una órbita geocéntrica muy elíptica, siendo su final más probable el impacto contra la superficie lunar el 4 de marzo de 2022, hecho que tuvo gran repercusión mediática al equivocarla los astrónoos con una posible nave de SpaceX fuera de control. Este impacto convirtió a Luxemburgo en la octava nación en alcanzar la superficie lunar.
El 15 de enero de 2025, la misión de ispace HAKUTO-R Mission 2 despegó con el microrróver Tenacious («tenaz») a borde del módulo de aterrizaje RESILIENCE. El vehículo fue diseñado construido y ensamblado por la empresa ispace-Europa (la empresa subsidiaria de ispace en Luxemburgo) con la cofinanciación de la Agencia Espacial de Luxemburgo por medio de un contrato de la ESA con el Programa Espacial Nacional de Luxemburgo (LuxIMPULSE). Medía 26 cm de alto, 31,5 cm de ancho y 54 cm de largo, y pesaba 5 kg aproximadamente.
Era el primer microrrover lunar diseñado, fabricado y ensamblado en Europa. Estaba equipado con una cámara HD frontal para la captura de imágenes de la superficie lunar. Las ruedas estaban diseñadas diseñadas para que el rover pudiese atravesar el regolito lunar con estabilidad. Estaba previsto que los comandos y datos se enviasen y recibiesen desde el centro de control de la misión a través del módulo de aterrizaje. Sin embargo el módulo de aterrizaje de la empresa nipona se estrelló en la maniobra final del aterrizaje con lo que sus cargas útiles se perieron, incluyendo este róver europeo.
Misiones rusas

Rusia también pretendía volver a aterrizar con su módulo no tripulado Luna 25 desde que lo hiciese por última vez en la era soviética, con el Luna 24, casi medio siglo atrás, en 1976. El lanzamiento de la nave se produjo el 10 de agosto de 2023 a la 1:10 de la madrugada (hora peninsular española) desde el cosmódromo de Vostochny en la región de Amur, en el lejano oriente ruso, a bordo de un cohete Soyuz-2.1b. La fecha prevista para el aterrizaje del módulo lunar en el polo sur, concretamente en el cráter Boguslawsky, era el 21 de agosto de 2023.
Sin embargo, durante las maniobras de corrección orbital el motor funcionó durante 127 segundos en vez de los 84 previstos, lo que provocó que la sonda se precipitase sobre la superficie de la Luna. La agencia espacial rusa perdía el contacto con la nave a falta de dos minutos para las dos de la tarde del día 19 (hora de Madrid), confirmándose la pérdida de comunicación con la nave el 20 de agosto.
A partir de los datos publicados por Roscosmos sobre la zona estimada del impacto, el LRO (Lunar Reconnaissance Orbiter) comparó diferentes fotografias anteriores y posteriores al mismo, hallando en una de ellas un nuevo cráter, fruto del choque de Luna 25 contra la superficie lunar. El cráter tiene unos 10 metros de diámetro y está situado a unos 400 km del punto de aterrizaje previsto del artefacto ruso.
El módulo ruso contaba con nueve equipos científicos como analizadores del regolito, medidores del plasma exosférico, espectrómetros, etc. Posee, así mismo, un brazo robótico, para toma de muestras del suelo, y posibles equipos de perforación.
Misiones de India
La India también ha querido entrar en el club de los países que exploran la Luna. Así, el 21 octubre de 2008, lanzó una nave, rumbo a nuestro satélite, integrado por un orbitador, el Chandrayaan-1 (en sánscrito, Chandra es «Luna» y Yaan «vehículo»), y un impactador, el Moon Impact Probe (MIP). El lanzamiento de la nave, de 1.380 kg, se llevó a cabo desde el Centro Espacial Satish Dhawan (SDSC), también llamado Sriharikota Range (SHAR), en la India, a bordo de un PSLV (Polar Satellite Launch Vehicle), un cohete desarrolado por la ISRO («Agencia India de Investigación Espacial») a finales del siglo XX. El PSLV se utilizaría cinco años más tarde para lanzar el Mars Orbiter (conocido como Mangalyaan).
Simulación del proceso de liberación del MIP por parte de Chandrayaan-1 (Luptonga / ISRO).
El 8 de noviembre la nave se situó en órbita lunar y seis días después dejó caer el módulo de impacto lunar MIP (Moon Impact Probe) desde una distancia de 100 kilómetros, golpeando el polo sur de manera controlada y haciendo de la India el cuarto país en lograr «tocar» la superfincie de nuestro satélite natural.
La idea fue que el orbitador mapease la superficie lunar con sus instrumentos de luz visible, rayos X e infrarrojos, y realizase un estudio químico de la misma. Además utilizó el material y los gases producidos por el impacto del MIP para su análisis.
La misión lunar transportaba cinco cargas útiles de ISRO y seis cargas útiles de otras agencias espaciales, como la NASA, al ESA y la Agencia Aeroespacial de Bulgaria.
Tras varios fallos en sus sistemas de navegación y con blindaje térmico deficiente, Chandrayaan-1 dejó de enviar señales de radio el 29 de agosto de 2009, lo que llevó a la agencia india a declarar oficialmente el final de la misión. A pesar de que su vida útil de dos años quedó reducida a 312 días, la mision cumplió el 95% de sus objetivos, contando entre sus logros el descubrimiento de la presencia generalizada de moléculas de agua en el suelo lunar.
Vídeo (acelerado 1.5×) que muestra un resumen de la misión Chandrayaan-2 desde su lanzamiento hasta la decepción final tras la pérdida del aterrizador Vikram (vídeo original: «How ISRO lost Vikram Lander» —Geospatial World—).
La agencia india trabajó en un segundo proyecto de investigación lunar: el Chandrayaan-2. En noviembre de 2007 el proyecto fue planificado conjuntamente por las agencias espaciales india y rusa con la pretensión de llevar a la Luna un orbitador, un aterrizador (Vikram) y un róver (Pragyan). La primera se encargaría de la construcción de ambos y Roscosmos diseñaría el módulo de aterrizaje. Tras varios retrasos del lado ruso y, sobre todo, tras el fracaso de ese módelo de modulo en la misión Fobos-Grunt, Roscosmos se retiró definitivamente. El gobierno indio asumió entonces elaborar el módulo de aterrizaje y, por tanto, la totalidad de la misión lunar.
El lanzamiento se llevó a cabo finalmente a las 11:13 (hora peninsular) del 22 de julio de 2019 desde el centro espacial Satish Dhawan. Para el despegue se usó un cohete más moderno y potente que el empleado en la misión anterior: el vehículo de lanzamiento de satélites geosíncronos de la India, GSLV MkIII (llamado ahora LVM3), que llevó a la nave a su órbita planificada desde la cual, tras determinadas maniobras, fue elevando su órbita. El 14 de agosto, con la maniobra Trans Lunar Insertion (TLI), la nave espacial escapó de la órbita de la Tierra y tomo una trayectoria camino de la Luna. El 20 de agosto de 2019, Chandrayaan-2 se insertó con éxito en la órbita lunar.
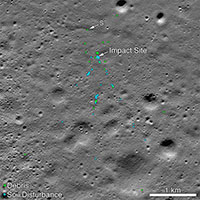
Desde una órbita polar lunar de 100 km, el 2 de septiembre de 2019, Vikram Lander se separó del Orbiter en preparación para el aterrizaje. Pasadas las 22:20 horas (hora peninsular de España) del 6 de septiembre de 2019 estaba programado el contacto del róver y el aterrizador, pero tras desviarse mientras concluía la maniobra se perdió el contacto. Se había estrellado contra la superficie, hecho este último constrastado meses después por la NASA analizando los estudios al respecto del ingeniero indio Shanmuga Subramanian, primero en determinar posibles restos de la nave.
En la fotografía del margen izquierdo (ampliar), publicada por la NASA el 2 de diciembre de 2019 (a partir de otras anteriores tomadas por la Lunar Reconnaissance Orbiter, LRO) se muestra el punto de impacto de Vikram Lander y el campo de escombros asociado. En ella, los puntos verdes indican restos de naves y los azules ubican el suelo alterado; la «S» indica escombros identificados por S. Subramanian
El orbitador sin embargo, no sufrió ningún percance y desde su inserción orbital, el 20 de agosto de 2019, permanece operativo. Su vida útil estimada es de 7,5 años.
India, tras su fracaso con el aterrizador Vikram, planifico un nuevo intento de alcanzar la superficie lunar y así, el 14 de julio de 2023, a las 11:05 (hora de Madrid) se lanzó el vehículo LVM3 M4, también desde el centro SDSC SHAR, Sriharikota (India). El cohete de esta nueva misión, llamada Chandrayaan-3, portaba un aterrizador (Vikram) y un róver (Pragyan), de 1.726 kg y 26 kg respectivamente.
El 5 de agosto, Chandrayaan-3 lograba su inserción exitosa en la órbita lunar. A partir de entonces se iniciaron una serie de maniobras para reducir gradualmente la órbita de la nave hasta colocarla sobre los polos lunares. Después de algunas operaciones, el módulo de propulsión se separó del módulo de aterrizaje estando en órbita. A continuación, se ejecutó una serie de complejas maniobras de frenado y aproximación para facilitar un aterrizaje suave en la región polar sur de la Luna, hito que se consiguió el 23 de agosto de 2023, a las 14:33 h en la España peninsular.
India se convertía así en el cuarto país en lograr posarse de forma exitosa sobre la superficie de nuestro satélite, y la primera en hacerlo en el su polo sur, zona de gran interés por su potencial en el empleo del agua helada, que seguramente alberga, para futuras misiones y bases. Hasta el momento de este alunizaje, potencias mundiales como Japón e Israel habían cosechado sendos fracasos. Hasta Rusia, con toda su experiencia de décadas, perdió la carrera con el país asiático, al que se iba a adelantar, por un par de días, en alcanzar la superficie polar con su Luna 25, nave que finalmente acabó estrellada contra el suelo.
El aterrizaje de la nave sobre la luna se convirtió en la transmisión de YouTube en vivo más vista del mundo hasta ese momento, con más de 8 millones de pico de espectadores simultáneos (PCV).
Despliegue de la rampa del módulo Vikram, de la misión Chandrayaan-3, y del panel solar del róver Pragyan y descenso de este a la superficie lunar (ISRO).
Después del aterrizaje, el róver Pragyan (que significa «sabiduría» en sánscrito) se desplegó perfectamente, descendió por una rampa de dos segmentos y dio un paseo por la luna, según notifocó la agencia ISRO en su cuenta de X (red social antes llamada Twitter). El róver fue el segundo vehículo operativo en la superficie lunar, junto al Yutu-2 de la misión Chang'e-4 de China, en el lado oculto de la Luna. Tenía un chasis rectangular, de 91,7 x 75,0 x 39,7 cm de tamaño y se desplazaba sobre un conjunto de tracción de seis ruedas. Contaba con cámaras de navegación y un panel solar que podía generar 50 W. Se comunicaba directamente con el módulo de aterrizaje a través de antenas Rx/Tx.
Las cargas útiles de la misión eran, entre otras:
- En el módulo de propulsión se introdujo un Espectropolarímetro del Planeta Tierra Habitable (SHAPE) para estudiar las mediciones espectrales y polarimétricas de la Tierra desde la órbita lunar.
- En el módulo de aterrizaje se incluyeron:
- Un elemento de Radioanatomía de la Ionosfera y la Atmósfera Hipersensibles a la Luna (RAMBHA), para medir la densidad del plasma superficial
- Un Experimento Termofísico Superficial de Chandra (ChaSTE), para medir la conductividad térmica y la temperatura
- Un Instrumento para la Actividad Sísmica Lunar (ILSA), para medir la sismicidad alrededor del lugar de aterrizaje
- La Sonda de Langmuir (LP), para estimar la densidad del plasma y sus variaciones
- Una Matriz de Retrorreflectores Láser pasivos (LRA) de la NASA para estudios de alcance de láser lunar.
- En el róver se montaron:
- Un Espectrómetro de Rayos X de Partículas Alfa (APXS)
- Un Espectroscopio de Descomposición Inducida por Láser (LIBS) para derivar la composición elemental en las cercanías del lugar de aterrizaje.
Ambos elementos, el módulo de aterrizaje y el vehículo lunar, utilizaron el orbitador de la misión anterior (Chandrayaan-2) para transmitir los datos recopilados durante su vida útil.
Esta exitosa misión, que ha situado a la India como potencia tecnológica y espacial mundial, ha dado descubrimientos y datos importantes, como la detección de rastros de azufre o la medición del perfil térmico de esta zona lunar inexplorada, mediciones de plasma y mediciones sísmicas.
A diferencia de Luna 25, que contaba con uranio radiactivo para mantener la temperatura de la nave, Chandrayaan-3, con su modesto presupuesto, no tenía un generador de calor, salvo el obtenido con sus paneles solares. Ello hacía difícil su supervivencia al día lunar, que dura 14 días, plazo que se dio como vida útil del ingenio. Si bien responsables de la misión como Anil Bhardwaj, director del Laboratorio de Investigación Física de la India, indicaron que podría aguantar más tiempo, tras el inicio de la segunda noche lunar, el 30 de septiembre, se descartó toda esperanza de recuperación.
El orbitador contaba con dos unidades de calentamiento de radioisótopos (RHU), por ello su duración se prolongó más allá que el resto de la misión. El 4 de diciembre de 2023 se traspasó a una órbita geocéntrica con la misión de observaciones de la Tierra hasta que dejó de funcionar el 22 de agosto de 2024.
Seguimiento de los últimos momentos del alunizaje de Chandrayan-3 y celebración desde el centro de control integrado de Varanasi, India (ISRO).
Imágenes tomadas por la cámara Lander Imager durante el aterrizaje del módulo de la misión Chandrayaan-3 (ISRO).
Tiempo transcurrido desde el alunizaje de Chandrayaan-3 sobre el polo lunar: XX años, XXX días, XX horas, XX minutos, XX segundos.
Misiones de otros países asiaticos (Corea del Sur, Pakistán, EAU e Israel)

Evidenciando el potencial asiático, Corea del Sur se convirtió el 4 de agosto de 2022 en el séptimo país (después de EE. UU., URSS, China, Japón, India y la UE) en lanzar con éxito una nave espacial a la Luna. La sonda, llamada oficialmente Danuri1, despegó desde Cabo Cañaveral (Florida, EE. UU.) a las 16:08 (hora peninsular española) a bordo de un Falcon 9 de SpaceX.
El Korea Pathfinder Lunar Orbiter (KPLO), como también es conocida la sonda, es la primera fase del Programa de Exploración Lunar de Corea (KLEP), cuya segunda etapa consistirá en un orbitador, un módulo de aterrizaje y un róver. La agencia espacial de Corea del Sur, llamada Instituto de Investigación Aeroespacial de Corea (KARI), contó con la colaboración de la NASA en la viabilidad del proyecto.
El 27 de diciembre de 2022, Danuri entró con éxito en la órbita de la Luna, según informó el Ministerio de Ciencia del país asiático. Su misión investigadora comenzó en enero de 2023 y tenía prevista una duración de un año (hasta diciembre de 2023), pero el análisis mostró que quedaba suficiente combustible, lo que extendió el período de la misión por dos años, hasta diciembre de 2025.
Los principales instrumentos de Danuri son:
- El Lunar Terrain Imager (LUTI): empleada en la captura de imágenes para la selección de probables sitios de aterrizaje de la segunda fase.
- La Cámara polarimétrica de gran angular (PolCam): tomará imágenes polarimétricas de la superficie lunar para analizar detalles del regolito lunar.
- El Magnetómetro KPLO (KMAG): medirá la fuerza magnética del entorno lunar.
- El Espectrómetro de rayos gamma KPLO (KGRS): usado para investigar la composición química de los materiales de la superficie lunar.
- El Experimento de redes tolerantes a demoras (DTNPL): es un experimento de un Internet interplanetario para la comunicación con dispositivos terrestres.
- La ShadowCam (de la NASA): mapeará la reflectancia dentro de las regiones permanentemente sombreadas para buscar evidencia de depósitos de hielo de agua.

El vecino índio, Pakistán, también consumó, por primera vez, el envío de una nave a la órbita lunar. Era un nanosatélite llamado ICUBE-QAMAR o ICUBE-Q desarrollado por estudiantes del Instituto de Tecnología Espacial de Islamabad, Pakistán. La nave (que no tiene realmente forma de cubesat pero se le considera tal) tenía un peso aproximado de 7 kg y portaba dos cámaras ópticas de un megapíxel para obtener imágenes de la superficie lunar, además de sistemas esenciales para el control de actitud, la gestión térmica y la comunicación en el espacio profundo.
Tras una rigurosa evaluación, ICUBE-Q fue seleccionado para se integrado en el orbitador Chang'e 6 de la CNSA. El nanosatélite fue lanzado de esta forma el 3 de mayo de 2024 en un cohete Long March 5 desde la base de lanzamientos espaciales de Wenchang (China). El satélite fue desplegado exitosamente desde el orbitador lunar chino las 10:14 (hora peninsular) el 8 de mayo de 2024. El satélite transmitió sus primeras fotografías a la Tierra el 11 de mayo de 2024, tomadas a una distancia de 200 km de la Luna.
Además de la obtención de imágenes detalladas de la superficie lunar, la sonda pakistaní tiene como objetivos el procesamiento inteligente de datos en órbita de las imágenes, la obtención de datos del campo magnético lunar, la conformación de un modelo del campo magnético lunar, la comprobación de nuevas tecnologías como las comunicaciones Tierra-Luna en el espacio profundo por medio de nanosatélites, y la exploración del espacio profundo a bajo costo basada en micro-nano satélites.
Si bien la duración planificada de la misión era de 2 a 6 meses aún sigue en activo.

Dentro del múndo árabe también Emiratos Árabes Unidos (EAU) ha querido participar de esta vorágine de misiones lunares iniciada con el nuevo milenio. En este caso, tras su exitosa aventura marciana con su nave Hope Mars, EAU envió al espacio el Rashid Rover, su primer vehículo lunar arábico. Fue lanzado a bordo de un cohete SpaceX Falcon 9 desde el Space Launch Complex 40, en la Estación de la Fuerza Espacial de Cabo Cañaveral, a las 08:38, hora peninsular de España. En el cronograma de la misión, el lanzamiento del vehículo estaba previsto para 2024 pero se adelantó unos dos años (al contrario de lo que suele suceder), de modo el alunizaje estaba programado para abril de 2023. Sin embargo, el módulo de aterrizaje japonés HAKUTO-R M1 que lo transportaba fracasó en su intento de alunizaje suave.
El nombre que se le dio fue puesto en honor del jeque Rashid Bin Saeed Al Maktoum, fallecido en 1990. El róver pesaba 10 kg y medía poco más de medio metro de largo y de ancho. Tenía 4 ruedas que lo debían mover a una velocidad de 10 cm/s. Portaba cuatro instrumentos científicos principales: cámaras gemelas de alta resolución en su mástil delantero, así como con una cámara microscópica y una cámara termográfica, así como una «sonda Langmuir» para tomar muestras del entorno de plasma que prevalece justo encima de la superficie lunar. Su vida útil prevista era corta, de unas dos semanas.
Como curiosidad, según informa la web de la ESA, la primera tecnología europea en contactar con la superficie lunar hubiese estado en las ruedas del róver Rashid, gracias a unos sensores con los que la agencia europea pretendía medir la abrasión y la adherencia de los materiales en que está trabajando sobre la superficie lunar.
El Centro Espacial Mohammed bin Rashid de los EAU planea lanzar una nueva misión lunar, Rashid 2, según anunció el jeque Mohammed bin Rashid Al-Maktoum, gobernante de Dubai al día siguiente de estrellarse el módulo nipón con el róver emiratí.
Por su parte, el Estado hebreo se estrenó en la exploración lunar con la misión lunar Beresheet (en alusión al Génesis) desarrollada por las organizaciones israelíes SpaceIL e IAI (Israel Aerospace Industries) con el apoyo de la ISA (Agencia Espacial Israelí). La nave fue lanzada en un cohete Falcon 9 de SpaceX desde Cabo Cañaveral (Florida, EE. UU.) el 22 de febrero de 2019 (fecha de Madrid).
El 4 de abril de ese año fue capturado con éxito por la gravedad lunar y llevó a cabo las maniobras necesarias hasta entrar en una órbita circular, en primer lugar, y en un descenso controlado sobre Mare Serenitatis el 11 de abril. Sin embargo el fallo de un giroscopio falló durante al acercarse al lugar de aterrizaje y cuando el control de misión logró restablecer las comunicaciones, que se habían perido momentáneamente, volvió a encender el motor principal de la nave, pero esta estaba ya demasiado cerca de la superficie (a 150 m de altura) y no pudo frenar lo suficiente, de modo que el módulo, que se movía a más de 500 km/h se golpeó contra el suelo lunar. La sonda llegó a enviar algunas fotografías antes del impacto.
Entre las cargas que transportaba la nave se encontraba una colonia de tardígrados que probablemente murieron en el impacto, pero que no presentan un riesgo real de una propagación en la Luna. Sin embargo este hecho abrió un debate sobre una posiblemente escasa regulación internacional sobre la protección planetaria.
Siguiente apartado »
1 El nombre Danuri fue decidido a partir de un concurso público de nombres. Está formado por dos palabras coreanas: dal («Luna») y nuri («disfrutar»).